
SOSMAG
SOSMAG - Service Oriented Spacecraft Magnetometer on GEO-KOMPSAT-2A
SOSMAG data is provided as part of the SWE Service Network’s General Data Services.
Access it via the SWE Data Browser or through HAPI.
The Instrument
SOSMAG is the first Space Weather instrument flying as part of ESA’s Distributed Space Weather Sensor System (D3S). It is included in the Korean Space Environment Monitor (KSEM) installed on the Korean GEO-KOMPSAT-2A satellite, that launched in December 2018 and is now located in GEO at 128° East.
SOSMAG is a multi-sensor magnetometer consisting of two science grade fluxgate sensors, mounted on a one-meter long boom, and two anisotropic magnetoresistance sensors mounted within the spacecraft body. The magnetometer system uses the mathematical combination of multiple sensors to attenuate magnetic disturbance from a spacecraft with no magnetic cleanliness program.
SOSMAG measures the magnetic field continuously with a maximum vector rate of 128 vectors per second at all four sensors. Within the Data Processing Unit (DPU), the magnetic field data is filtered and decimated by a commandable integer factor, typically it is reduced to 1 vector per second. In addition, a cleaned vector is calculated as a linear combination of the measurements from all sensors. The data from the magnetic sensors are multiplied with a 3x3 calibration matrix and corrected for a static offset value before the cleaned vector is processed.
Detailed information about the SOSMAG instrument and the used data cleaning method can be found in:
Magnes, W., O. Hillenmaier, H.-U. Auster, P. Brown, S. Kraft, J. Seon, M. Delva, et al. 'Space Weather Magnetometer Aboard GEO-KOMPSAT-2A'. Space Science Reviews, 216, 119 (2020).
Constantinescu, O. D., H.-U. Auster, M. Delva, O. Hillenmaier, W. Magnes, and F. Plaschke. 'Principal Component Gradiometer Technique for Removal of Spacecraft-Generated Disturbances from Magnetic Field Data'. Geoscientific Instrumentation, Methods and Data Systems Discussions , 25 May 2020, 1-26.
The Data
Data is given as 3-axis vector of magnetic field (B) in nT in HPEN (north pole, east, nadir) and GSE (geocentric solar ecliptic) coordinates, together with UTC time stamps and satellite position in GSE.
In addition, data flags are given for calibration quality as well as data caveats identified during processing.
Data from SOSMAG is available in three different flavors with different delays and calibration qualities.
- Real-time data is provided with a delay of up to 5 minutes. This data uses the best estimate for calibration and cleaning factors available prior to data analysis. These calibration and cleaning factors may not be fully accurate and lead to a data accuracy of better than 7 nT with respect to AC corrections and better than 8 nT with respect to DC correction.
- Preliminary data is provided with a delay of up to 2 days. Also this data uses priors for calibration and cleaning factors, but attempts to close all gaps that may have occurred in real-time data transmission. Final data, see below, supersedes preliminary data, i.e. these data sets share the same storage and final data is considered as updated version of preliminary data.
- Final data is provided with a delay of 98 days. This data uses updated calibrations and cleaning factors that were determined specifically for this data. In addition, the signal is examined for residual distortion and periods with distortion are flagged. The accuracy of final data is better than 1 nT with respect to AC corrections, unless a period is flagged to have worse accuracy (better than 3 nT or 5 nT), and better than 5 nT with respect to DC corrections.
More details on the data can be found under the following linked document: SOSMAG Data Description.
❗The SOSMAG datasets are being renamed. Please use the new dataset names and HAPI identifiers:
- "SOSMAG-GK2A-realtime (ESA)"
Identifier: d3s_gk2a_sosmag_1m
HAPI identifier: spase://SSA/NumericalData/D3S/d3s_gk2a_sosmag_1m- "SOSMAG-GK2A-L2 (ESA)"
Identifier: d3s_gk2a_sosmag_recalib
HAPI identifier: spase://SSA/NumericalData/D3S/d3s_gk2a_sosmag_recalib
The KSEM suite
The KSEM instrument suite on GEO-KOMPSAT-2A, in addition to SOSMAG, contains a particle detector (PD) and a charge monitor (CM). Their Level 1 data is made available in collaboration with the Korean Meteorological Administration.
The PD measures the fluxes of electrons and protons in an energy range of 100 keV to 3.8 MeV and 150 keV to 22.5 MeV, respectively. The CM is for direct monitoring of the satellite’s internal charging, and its products are used for cross-verification with PD data.
Detailed information on the PD can be found in e.g.:
- Oh, D., Kim, J., Loto’aniu, P.T.M. et al. Energetic particle flux measurements from the Korean space weather monitor particle detector: a comparative study with the MPS-HI onboard GOES-16. Earth Planets Space 76, 46 (2024).
- W.-H. Seol, C.-H. Lee, J. Seon, et. al. Estimation of Geometric Factors for the Particle Detecting Instruments of the Geostationary Satellite GK2A at 128.2°E Longitude Based on Observations of the Outer Radiation Belt During Geomagnetically Quiet Periods. Space Weather 21, 1 (2023).
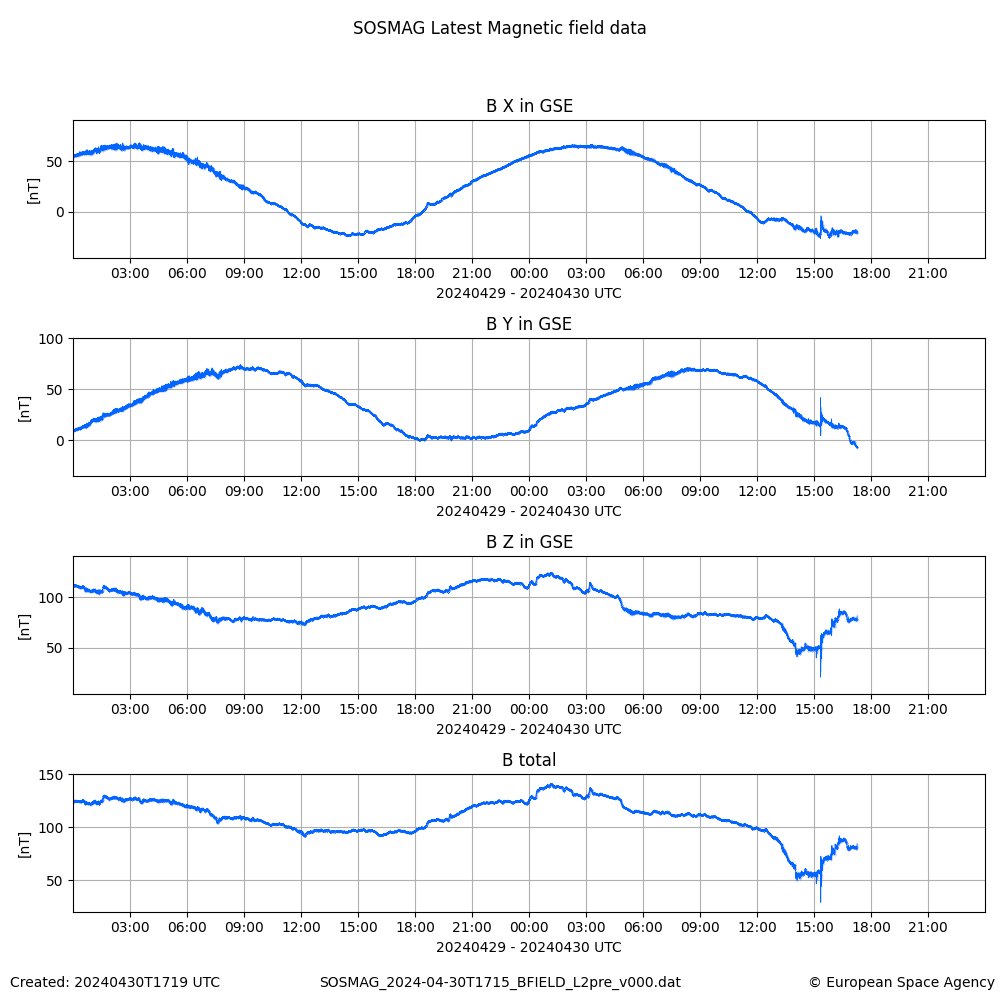
Figure 1, Illustration of ESA’s Distributed Space Weather Sensor System concept planned to be realized through hosted payload missions as well as dedicated small satellite missions.
Figure 2, GK-2A spacecraft during a pre-launch test campaign. The stowed SOSMAG boom with the two fluxgate sensors is indicated with a dotted rectangle. The approximate mounting position of the two AMR sensors within the spacecraft is shown by two white dots. The AMR 1 sensor is located near the +X/+Y corner of the spacecraft and the AMR 2 is mounted close to the +X side wall next to the launch lock of the boom.
Figure 3, Picture of the SOSMAG qualification model with a) electronics box, b) boom with carbon fibre based interface plate,
c) two fluxgate sensors mounted onto the boom and d) two anisotropic magnetoresistance sensors.